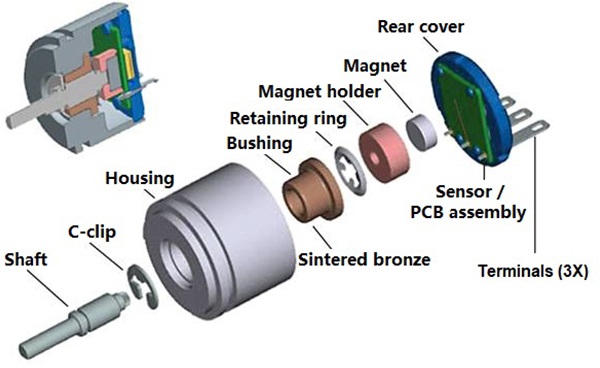
Pokud máte možnost demontovat magnetický rotační kodér, obvykle uvidíte vnitřní strukturu, jako je ta na obrázku výše. Magnetický kodér se skládá z mechanického hřídele, konstrukce pláště, sestavy PCB na konci kodéru a maléhodiskový magnetrotující s hřídelí na konci mechanické hřídele.
Jak magnetický kodér měří zpětnou vazbu polohy otáčení?
Hallův jev: vytvoření rozdílu potenciálu ve vodiči, který vede elektrický proud, když je magnetické pole aplikováno ve směru kolmém ke směru procházejícího proudu.
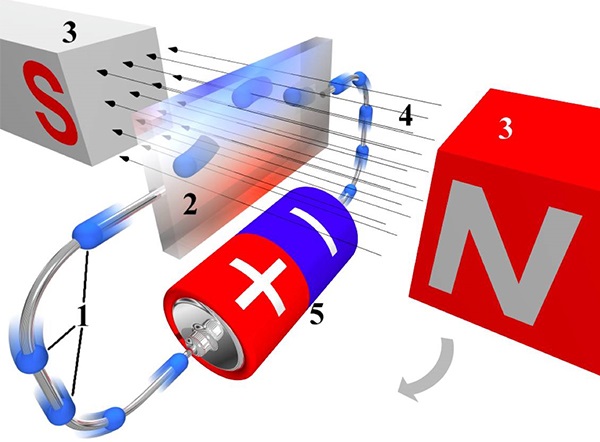
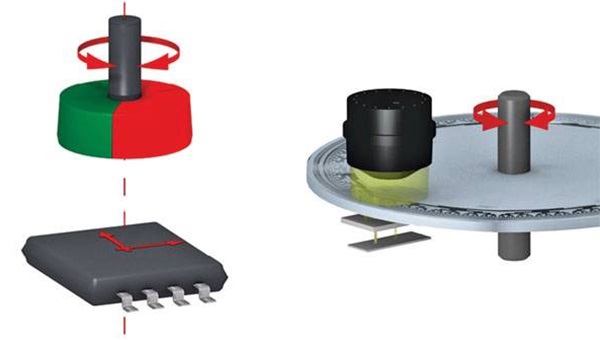
Pokud se magnetické pole aplikované na vodič otočí ve směru znázorněném šipkou výše s dráhou toku proudu jako osou, rozdíl Hallových potenciálů se změní v důsledku změny úhlu mezi magnetickým polem a vodičem. trend změny potenciálového rozdílu je sinusová křivka. Proto lze na základě napětí na obou stranách napájeného vodiče vypočítat úhel natočení magnetického pole obráceně. Toto je základní pracovní mechanismus magnetického kodéru při měření zpětné vazby polohy otáčení.
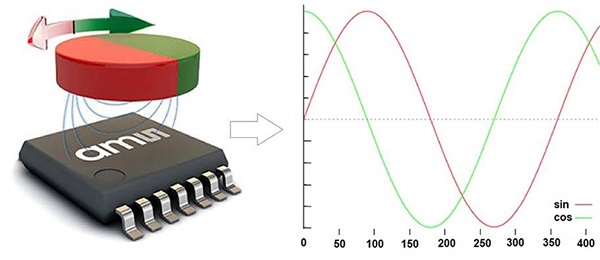
Podobně jako u principu, že resolver využívá dvě sady vzájemně kolmých výstupních cívek, jsou v magnetickém kodéru zapotřebí také dva (nebo dva páry) Hallovy indukční prvky se vzájemně kolmými směry proudu, aby byla zajištěna jedinečná korespondence mezi rotační polohou magnetického pole. a výstupní napětí (kombinace).
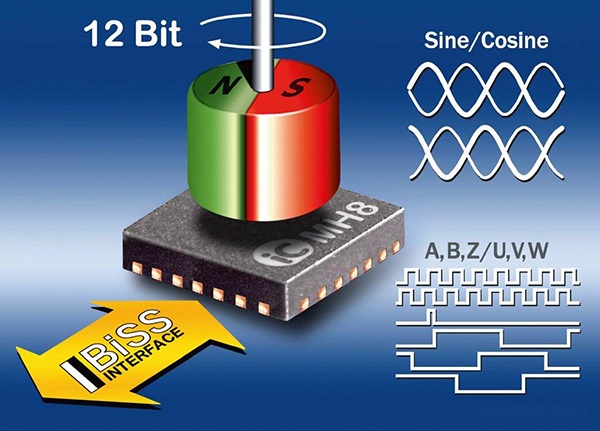
Hallovy senzory (čipy) používané v magnetických enkodérech mají v dnešní době obecně vysoký stupeň integrace, který nejen integruje hallové polovodičové součástky a související obvody pro zpracování a regulaci signálů, ale také integruje různé typy modulů výstupních signálů, jako je sinusový a kosinový analog. signály, obdélníkové signály digitální úrovně nebo výstupní jednotky sběrnicové komunikace.
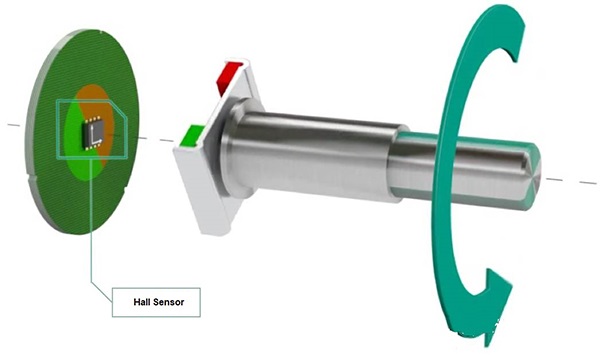
Tímto způsobem nainstalujte permanentní magnet, jako je slinutý neodymový magnet, který generuje magnetické pole na konci otočné hřídele kodéru, umístěte výše zmíněný Hallův senzorový čip na desku plošných spojů a přibližte se k permanentnímu magnetu na konci kodéru. hřídel podle určitých požadavků (směr a vzdálenost).
Analýzou výstupního napěťového signálu z Hallova senzoru přes desku plošných spojů lze identifikovat polohu otáčení rotoru kodéru.
Struktura a pracovní princip magnetického kódování rozhoduje o speciálních požadavcích na tento permanentní magnet, např. materiál magnetu, tvar magnetu, směr magnetizace atd. Normálnědiametrálně magnetizovaný neodymový magnetdisk je nejlepší varianta magnetu. Ningbo Horizon Magnetics má zkušenosti s dodávkami mnoha výrobců magnetických kódů s některými velikostmidiametrální neodymové diskové magnety, D6x2,5mm a D10x2,5mm diametrální kotoučové Neodymové magnety, z nichž jsou nejoblíbenější modely.
Je vidět, že ve srovnání s tradičním optickým kodérem nepotřebuje magnetický kodér složitý kódový disk a zdroj světla, počet komponent je menší a detekční struktura je jednodušší. Navíc samotný Hallův prvek má také mnoho výhod, jako je pevná konstrukce, malé rozměry, nízká hmotnost, dlouhá životnost, odolnost proti vibracím, nebojí se znečištění prachem, olejem, vodní párou a solnou mlhou nebo koroze.
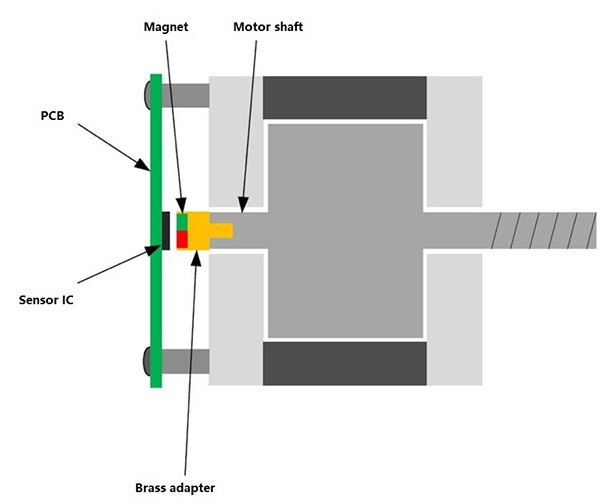
Když je technologie magnetického kodéru aplikována na zpětnou vazbu polohy otáčení elektromotoru,sintrovaný NdFeB magnetický válecmagnetického enkodéru lze instalovat přímo na konec hřídele motoru. Tímto způsobem může eliminovat přechodové spojkové ložisko (nebo spojku) potřebné při použití tradičního zpětnovazebního snímače polohy a dosáhnout bezkontaktního měření polohy, což snižuje riziko selhání (nebo dokonce poškození) snímače v důsledku vibrací mechanické hřídele během chod elektromotoru. Pomáhá tedy zlepšit stabilitu chodu elektromotoru.
Čas odeslání: 21. července 2022